{kind=link}

車椅子に乗った下肢障害者は階段を上り下りできない。立ち上がることができず、窓を開け閉めしたり、本棚に本を挿したりするなどの日常的な動作も難しい。韓国機械研究院(パク・サンジン院長)は、このような問題を解決できるロボット車椅子を開発した。
韓国機械研究院は、階段を上り下りする「階段昇降モジュール」と、患者を起こしたり横にさせたりなど、多様な姿勢を取らせることができる「スタンディングモジュール」を開発。この二つのモジュールを合わせ、ロボット車椅子を作った。
階段を上る車椅子と、立ち上がって移動できる車椅子はこれまであったが、両モジュールを統合して1台の車椅子としたのは世界に例がない。階段を上り、立って移動し、多様な姿勢に変換することが1台のロボット車椅子で可能になり、下肢障害者が空間的な制約なしに日常生活を送るのに大きく役立つと期待されている。
機械研AIロボット研究本部の研究チームは「ㄹ」字型の無限軌道クローラーを設計し、車椅子下部に装着して階段昇降モジュールを開発した。このクローラーは、普段は車椅子の内部に格納されているが、必要な時に下に出てくる。階段を上り下りする間に「ㄹ」字型クローラーが階段の角と踏み台に同時に接触し、安定性を高めた。
複雑なメカニズムなしに、クローラーの下降と上昇駆動だけで階段を上がることができ、構造も単純だ。
また、研究チームは平行四辺形の独特な機構構造と、自重補償機構を適用し、車椅子に座った状態で立ち上がったり、横になったりするなど、5つの姿勢変換が可能なスタンディングモジュールを開発した。ロボット自体の重量によって発生する必要トルクを最小化する自重補償機構によって、必要トルクを最大80%まで低減し、小さくて軽いスタンディングモジュールを実現した。
車椅子に乗った状態でさまざまな姿勢に変換することができ、特定の身体部位の圧力が強まるのを防ぐため、床ずれ防止と血液循環にも役立つ。
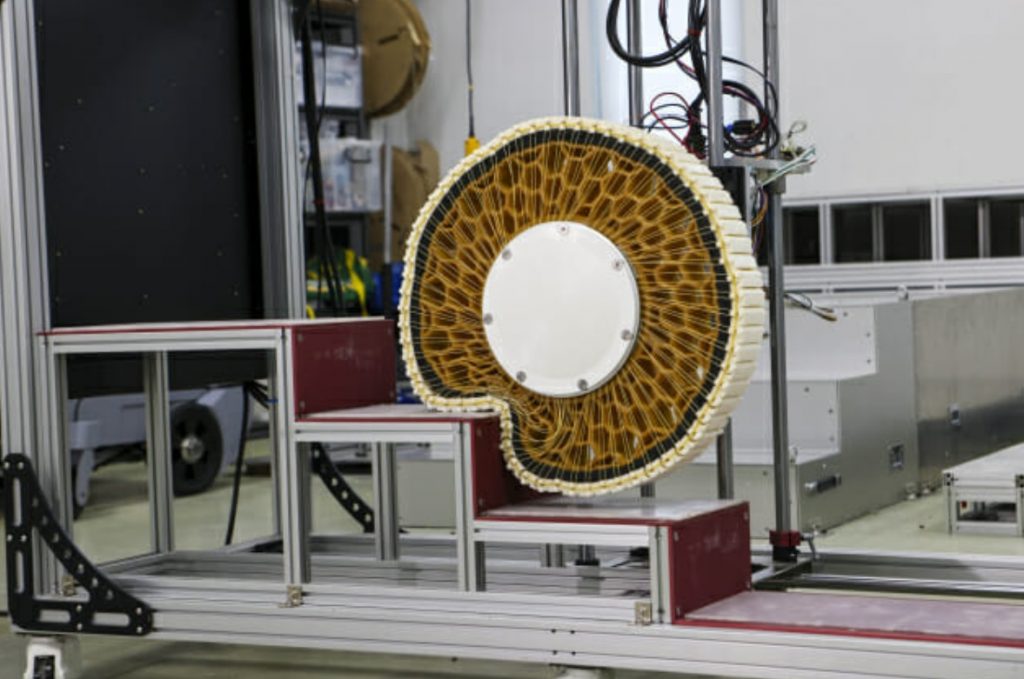
研究チームはクローラーを利用した階段昇降技術以外にも、円形ホイールだけで階段を上ることができる「変形ホイール」技術も開発した。この変形ホイールは、平地では一般ホイールのように円形を維持しながら移動するが、障害物があるとホイールの剛性が低くなり、障害物の形状と一致するように形状が変わり、障害物を踏みながら通過することができる。
変形方向によって距離の変わる特殊なチェーンブロックがホイール表面に構成されているためだ。これは、水滴の表面張力にアイデアを得た新たな剛性調節メカニズムを世界で初めて開発・適用した結果である。
ホイールだけで平地高速移動と障害物の対処が可能で、ロボット車椅子だけでなく多様な移動ロボットなどに活用できるものと期待される。
機械研AIロボット研究本部のパク・チャンフン本部長は「このロボット車椅子技術は、障害者のことを考慮せずに設置された施設やインフラなどを下肢障害者が利用できるようにする目的で開発された。この技術を迅速に広め、障害者の生活の質の向上に寄与したい」と話している。
(c)KOREA WAVE