
韓国研究チームが汗をかいても、長期間リハビリに活用できるウェアラブルロボット制御センサーを開発した。
韓国科学技術院(KAIST)は電気電子工学部のチョン・ジェウン教授・機械工学科のキム・ジョン教授の研究チームが皮膚状態に影響されない高品質の電気生理信号測定が可能な伸縮・接着性マイクロニードルセンサーを開発することに成功したと明らかにした。
リハビリに活用されるウェアラブルロボットが人の動きの意図を認識するためには、体から発生する筋電図を正確に測定するウェアラブル電気生理センサーが必要だ。
しかし、従来のセンサーは時間とともに信号の品質が落ちたり、毛、角質、汗などの影響を多く受け、ノイズを発生する可能性があった。
これは、長時間の信頼性の高いウェアラブルロボットの制御を困難にする。
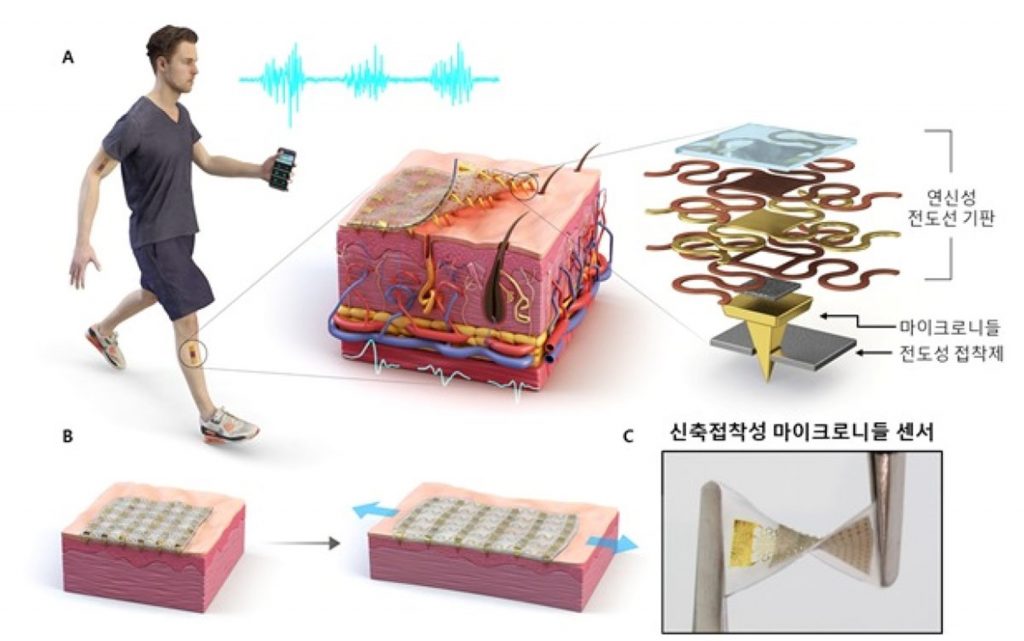
これに対し、研究チームは、柔らかいシリコン共重合体基板を活用してマイクロニードルを集積し、伸縮・接着性マイクロニードルセンサーを製作した。
これによって硬いマイクロニードルが高い抵抗を持つ皮膚の角質層を透過し、皮膚接触抵抗を効果的に下げて毛、角質、汗、異物で皮膚が汚染されても高品質の電気生理信号を得ることができる。
また、柔らかい伝導性接着基板が人の動きによる皮膚の伸びに順応して快適な着用感を提供し、動きによる動作雑音を最小限に抑えることができる。
研究チームはウェアラブルロボットを利用して動作補助実験をした結果、足に付着した伸縮・接着性マイクロニードルセンサーパッチは、筋肉から発生する電気信号を感知し、動作の意図をウェアラブルロボットに伝送して人が重い荷物を簡単に持ち上げることができるようになる。
この他に、マイクロニードルセンサーパッチを使用した際、肌の状態、身体の動きの大きさや種類に関係なく、安定的な筋電図センシングに基づいた動作意図認識を通じて、ウェアラブルロボットがユーザーの動作を効果的に補助できることを確認した。
(c)news1

{kind=link}