{kind=link}
「自動化の裏には経済性と生産性があります。どれだけ優れた自動化であっても、コストがかかりすぎたり、人の方が生産的であれば実効性がありません」
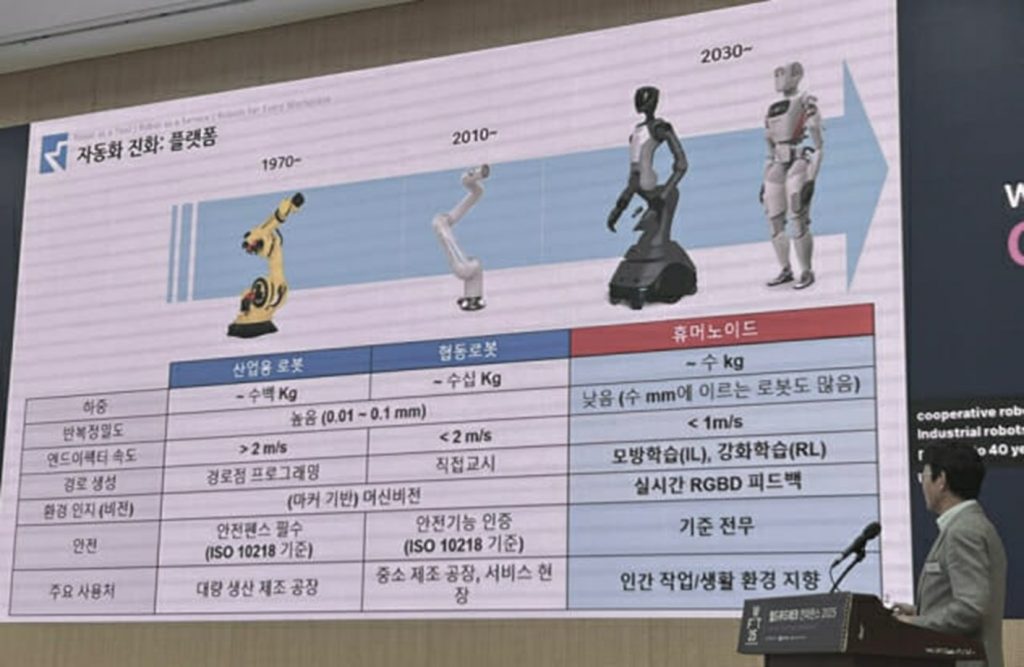
韓国のロボット企業「Neuromeka(ニューロメカ)」のパク・ジョンフン代表は10月13日、ソウルの韓国科学技術会館で開かれた「ワールドフードテック2025カンファレンス」で、フードテックにおける自動化の現状と課題について論じ、フィジカルAIとヒューマノイドを組み合わせた調理自動化の構想を公開した。
メガ・ニュース(MEGA News)のシン・ヨンビン記者の取材によると、パク・ジョンフン代表は現実的なアプローチとして「半自動化」を提案した。「人による作業のうち、一部だけを最小限修正し、ロボットが人にとって困難な部分を代行する」という方式だ。
代表的な例としてフライドチキンの調理工程を挙げ、「ロボット1台が1時間に約12羽を揚げられ、価格は4000万ウォン台半ば程度」とし、「十分に生産性が高く、経済性も認められている分野だ」と語った。
一方、ロボットバリスタについては、生産性が最大の障壁とされた。「バリスタは1杯あたり40〜45秒程度だが、ロボットでは1分15秒〜1分30秒かかる。それでは1時間に40杯しか売れない」
そのため、工場自動化のノウハウを適用してコンベヤー・PLCベースの完全自動コーヒーシステムを作ったが、あまりにも高価で経済性に限界があると評価した。「我々が経済性を取るか、生産性を取るかが非常に重要だ」
◇究極の目標は「ヒューマノイドが台所で料理する」
ラーメン調理の自動化の事例を通じて、システムインテグレーション(SI)費用が構造的な問題であることを指摘した。
「ラーメンの工程を自動化するには多くの作業が必要だ。ラーメンロボットを作るとなると、ロボットが占める割合は約20%、残りの60%は周辺装置、20%は運用に関するものだ」
パク・ジョンフン代表は、ヒューマノイドがSI問題を解決する代案になり得ると見ている。「ヒューマノイドはすでに腕に手が付いていて、移動用の自由駆動ロボットまたは脚がある」としながらも、現実的な制約も挙げた。「現在ヒューマノイドをやるには、大きく三つのインフラが必要だ。Neuromekaはロボットプラットフォーム、データファクトリー、データインフラの三つをすべて備えている」
Neuromekaは、人が使用する道具をそのまま使うという前提でデータを収集する「データファクトリー」を標準化し、大学など3~4カ所でラーメン調理に関するデータを抽出中だ。
ラーメン調理に必要な5つの核心技術として▽水を注ぐ作業▽袋やスープを開ける作業▽トングの操作▽卵を割って入れる作業▽トッポッキやネギを適切に盛りつける――といったプレーティングまでを挙げた。
パク・ジョンフン代表は「この5つの技術を中核と見て、ラーメン調理分野のファウンデーションモデル、すなわちバーティカルRFMを作る必要がある」と述べた。大規模言語モデル(LLM)と比較し、「ロボットはVLA(Vertical Learning Architecture)を基に行動まで生み出さなければならない」と説明した。
学習方法としては模倣学習を中心に進めていると紹介した。「リモートデバイスさえあれば動作をうまく模倣できる。約20種類の動作データを与えれば、様々な状況に対応できる」
安全性については4段階の制御レイヤーで担保している。「脊髄反射神経のようなレイヤーを設けて、両腕の衝突や胴体との衝突が起きないようにしている。システムレイヤーのほかに、ロボティクス、そしてその下には絶対的な安全性まで、4つのレイヤーでファウンデーションモデルを作っている」
具体的な例としては、非定型なはんだ付けを学習させ、1時間続けると99%の成功率で作業が可能になるという。人が近づくと回避しながらはんだ付けをするそうだ。また、小麦粉・ゴマ・塩といった物質をほぼ1グラム以内の誤差で正確に計量できる学習結果も提示した。
パク・ジョンフン代表は「ラーメンを作る技術は来年には成果をお見せできるだろう。ヒューマノイドが人の使う台所空間にそのまま入り、調理器具を使って料理をするのが究極の目標だ」と語った。
(c)KOREA WAVE